El término sonar, acrónimo de "Sound Navigation And Ranging" (Navegación y Rango por Sonido), se refiere a un sistema que utiliza ondas sonoras para detectar y localizar objetos sumergidos en el agua. Este aparato es crucial para una variedad de aplicaciones, desde la detección de submarinos y minas hasta la cartografía del relieve de los fondos marinos y la localización de bancos de peces. Su principio fundamental se basa en la emisión de vibraciones que, al encontrar un objeto, son reflejadas y captadas nuevamente, permitiendo así determinar la presencia, distancia y, en algunos casos, la naturaleza del objeto detectado.
Origen y Evolución del Sonar
La necesidad de un aparato eficaz para la lucha antisubmarina impulsó la creación del sonar. Antes de su invención, se empleaban hidrófonos, que detectaban señales y ruidos emitidos por los objetos. Sin embargo, estos métodos resultaban insuficientes si los submarinos navegaban en silencio, a baja velocidad o a gran profundidad. Los primeros experimentos con sistemas de localización acústica datan de alrededor de 1917, en plena Primera Guerra Mundial, aunque la guerra concluyó antes de que el sistema estuviera completamente operativo. Durante el periodo de entreguerras, el sonar experimentó progresos significativos. Los británicos, en particular, depositaban gran confianza en el sonar como arma antisubmarina. Sin embargo, la creencia de que el sonar anularía la efectividad de los submarinos no se cumplió del todo, y la guerra trajo consigo miles de vidas de marinos mercantes. Esto se debió en parte a que la guerra comenzó antes de que los operadores dominaran el sistema perfectamente, a que el sistema no era tan infalible como se pensaba, y a la falta de equipamiento y tácticas antisubmarinas adecuadas.
A pesar de estos desafíos iniciales, las características del sonar fueron aprovechadas para otras aplicaciones, como la comunicación submarina, la detección de fondos rocosos y la cartografía del relieve submarino. Leonardo da Vinci ya había registrado en 1490 un método para detectar barcos mediante un tubo sumergido y un oído en su extremo. El desastre del Titanic en 1912 impulsó aún más la investigación en ecolocalización submarina. La primera patente mundial para un dispositivo de este tipo fue concedida en 1912, seguida por otra en 1913. Durante la Primera Guerra Mundial, la investigación se intensificó, con franceses y británicos desarrollando dispositivos activos de sonido. El físico canadiense Robert Boyle, bajo patrocinio británico, construyó un prototipo de sonar activo en 1917 utilizando cristales piezoeléctricos, creando el primer aparato factible de detección activa subacuática. Para 1918, Francia y Gran Bretaña contaban con sistemas activos, conocidos como ASDIC (Anti-Submarine Detection Investigation Committee), que comenzaron a ser producidos y desplegados en buques de guerra en la década de 1920.
Principios de Funcionamiento del Sonar
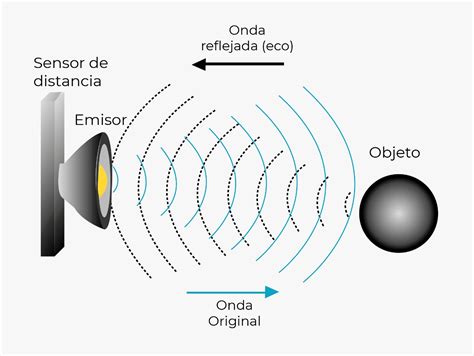
El funcionamiento del sonar es análogo al del radar, pero utiliza ondas sonoras en lugar de electromagnéticas. El proceso se inicia con la emisión de un pulso de sonido (un "ping") a través de un dispositivo llamado transductor. Este pulso viaja por el agua y, al chocar con un objeto, se refleja como un eco. El mismo transductor o un receptor capta este eco. El tiempo transcurrido entre la emisión del pulso y la recepción del eco es medido con precisión. Conociendo la velocidad de propagación de las ondas sonoras en el agua, se puede calcular la distancia al objeto mediante la fórmula:
D = V * t / 2
Donde:
- D es la distancia al objeto.
- V es la velocidad de propagación de las ondas ultrasonoras en el agua de mar (aproximadamente 1.500 metros por segundo, aunque varía según la temperatura, salinidad y presión).
- t es el tiempo cronometrado entre la emisión y la recepción del eco.
El valor '2' en el denominador se utiliza porque la onda sonora recorre la distancia hasta el objeto y luego regresa. Los sistemas de sonar modernos a menudo incorporan dispositivos que resuelven esta fórmula directamente y presentan el resultado en una pantalla. La dirección del objeto se determina mediante la dirección de la radiación del transductor y su posición, a menudo indicada en un círculo graduado sincronizado con el proyector.
Componentes Clave del Sonar
Los componentes esenciales de un sistema de sonar incluyen:
- Transductor: Es el corazón del sistema, responsable de convertir las señales eléctricas en vibraciones acústicas (ondas sonoras) y, a la inversa, las ondas sonoras recibidas en señales eléctricas.
- Hidrófonos: Actúan como micrófonos submarinos, captando los sonidos del entorno. En sistemas pasivos, son los principales receptores.
- Software de Interpretación: Los sistemas modernos utilizan software avanzado para procesar los datos acústicos, filtrar el ruido y generar imágenes o representaciones detalladas del entorno submarino.
Tipos de Sonar: Activo y Pasivo
Existen dos modos principales de operación para los sistemas de sonar:
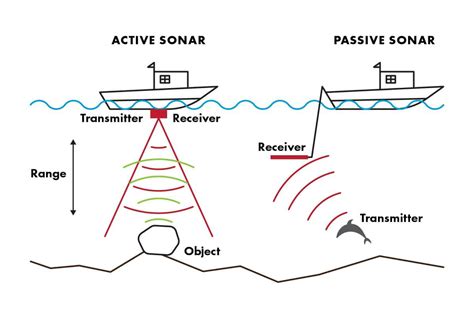
Sonar Activo
En el sonar activo, el dispositivo emite un pulso de sonido y luego escucha el eco que regresa tras rebotar en los objetos. Este método permite determinar la distancia, la dirección y, con suficiente resolución, la forma o tamaño del objeto. Es el tipo más común y se utiliza ampliamente en la pesca, la exploración submarina y las aplicaciones militares para la detección de objetivos.
Sonar Pasivo
El sonar pasivo, en contraste, no emite ningún sonido. En su lugar, se limita a escuchar y analizar los sonidos que provienen de fuentes externas, como motores de barcos, submarinos u otras actividades submarinas. Los hidrófonos captan estos sonidos, que luego son analizados para identificar la fuente, su dirección y, a veces, su tipo o actividad. El sonar pasivo es crucial para operaciones de sigilo, ya que no revela la posición del receptor. La identificación de la fuente de sonido puede basarse en la frecuencia característica de los motores (por ejemplo, 50 Hz o 60 Hz para sistemas eléctricos de diferentes orígenes) o en patrones sonoros específicos.
¿Qué es un sonar? Propagación acústica de ondas
Diferencias Clave entre Sonar y Radar
Aunque ambos sistemas se utilizan para la detección y localización de objetos, el sonar y el radar operan sobre principios físicos distintos:
- Principio de Funcionamiento: El sonar utiliza ondas sonoras, mientras que el radar emplea ondas electromagnéticas (ondas de radio).
- Medio de Propagación: Las ondas sonoras se propagan eficientemente a través del agua, lo que hace al sonar indispensable para la detección submarina. Las ondas electromagnéticas del radar, sin embargo, no viajan bien bajo el agua y son absorbidas rápidamente por ella.
- Aplicaciones: El sonar es la herramienta principal para la detección y exploración bajo la superficie del agua. El radar se utiliza para la detección de objetos en el aire o en la superficie del mar, y para el control del tráfico marítimo y aéreo.
Por lo tanto, mientras el radar es ideal para detectar barcos en la superficie o aviones en el aire, el sonar es insustituible para "ver" en las profundidades oceánicas.
Frecuencias y Ultrasonido en Sonar
La frecuencia de las ondas sonoras es un factor crítico en el funcionamiento del sonar, afectando tanto el alcance como la precisión del sistema:
- Baja Frecuencia: Las frecuencias más bajas permiten que las ondas sonoras viajen distancias más largas, pero con menor detalle en la imagen resultante.
- Alta Frecuencia (Ultrasonido): El uso de frecuencias más altas, conocidas como ultrasonido (generalmente por encima de 20 kHz, el límite superior del oído humano), proporciona mayor precisión y detalle. Esto es ideal para localizar objetos pequeños, identificar especies de peces específicas o para obtener una imagen detallada del fondo marino. Los transductores de sonar suelen operar en rangos de frecuencia que van desde infrasonidos hasta cientos de kilohertzios, incluyendo el espectro de ultrasonido.
La elección de la frecuencia depende directamente de la aplicación: para sondeos de largo alcance se prefieren frecuencias bajas, mientras que para la pesca detallada o la cartografía de alta resolución se utilizan frecuencias más altas.
Aplicaciones del Sonar en Navegación, Pesca y Exploración
El sonar es una tecnología multifacética con aplicaciones vitales en diversos campos:
Detección de Peces
En la pesca comercial y recreativa, el sonar es una herramienta indispensable. Permite a los pescadores localizar bancos de peces, estimar su tamaño y profundidad, optimizando así las capturas y reduciendo el tiempo de búsqueda. Los sonares especializados pueden incluso detectar el movimiento de los peces en tiempo real.
Navegación Segura y Evitación de Obstáculos
Los barcos utilizan el sonar para medir la profundidad del agua y detectar obstáculos como rocas, naufragios o formaciones del fondo marino. Esto es fundamental para la navegación segura, especialmente en aguas poco profundas o desconocidas, y para la planificación de rutas.
Exploración Marina y Oceanografía
El sonar se emplea extensivamente para mapear el fondo oceánico, estudiar la geología submarina, identificar depósitos minerales y realizar investigaciones oceanográficas. La capacidad de obtener imágenes detalladas de las profundidades permite a los científicos comprender mejor los ecosistemas marinos y los procesos geológicos.
Operaciones Militares y Seguridad
En el ámbito militar, el sonar es crucial para la detección de submarinos, minas y otras amenazas submarinas. Los submarinos modernos utilizan sonar pasivo para operar de forma sigilosa, mientras que las armadas emplean sonares activos y pasivos en buques de superficie y aeronaves para la guerra antisubmarina.
Impacto de las Condiciones del Agua en el Sonar
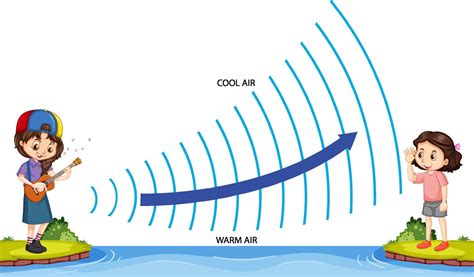
La efectividad y precisión del sonar se ven influenciadas significativamente por las propiedades del medio acuático, principalmente la temperatura, la salinidad y la presión. Estos factores afectan la velocidad del sonido en el agua, que es un parámetro clave en los cálculos de distancia. La velocidad del sonido en el agua salada es aproximadamente de 1.500 metros por segundo, pero puede variar. La presencia de capas de agua con diferentes temperaturas, como la termoclina (una capa de cambio rápido de temperatura entre el agua superficial cálida y el agua profunda fría), puede causar la refracción de las ondas sonoras, alterando su trayectoria y afectando la precisión de la detección. La presión creciente con la profundidad también puede influir en la propagación del sonido. Las variaciones en estas condiciones pueden crear "zonas de convergencia" donde las señales sonoras se concentran, permitiendo detecciones a distancias mucho mayores de lo esperado en línea recta, pero también pueden generar pérdidas de señal o interferencias que reducen la fiabilidad.
Impacto en la Fauna Marina
Si bien el sonar es una herramienta valiosa, su uso, especialmente el de alta potencia en aplicaciones militares, puede tener efectos perjudiciales en la fauna marina. Se ha sugerido que las transmisiones de sonar pueden desorientar o causar pánico en animales como ballenas y delfines, llevándolos a emerger rápidamente y sufrir problemas similares al síndrome de descompresión. Se han documentado casos de encallamientos masivos de cetáceos asociados a ejercicios de sonar naval.